



What is a Hexapod?
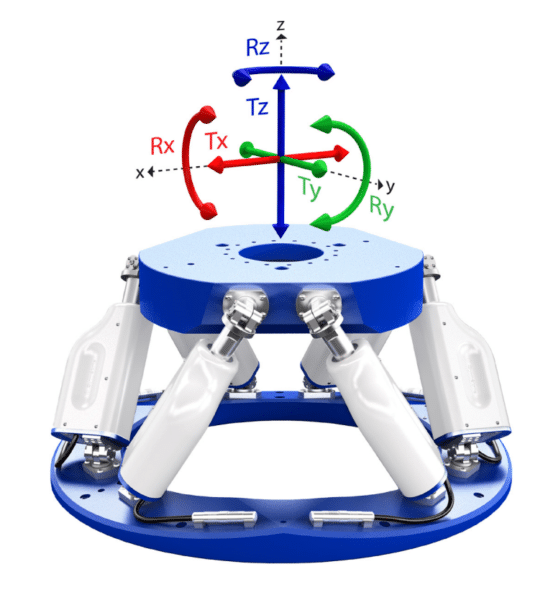
A Hexapod, or Stewart Platform, is a parallel kinematic structure composed of a mobile platform linked to a fixed platform with 6 actuators. This design allows you to move an object placed on the mobile platform with 6 DOF (Degrees Of Freedom). In other words, the hexapod can move an object along the 3 translations (Tx, Ty, Tz) and the 3 rotations (Rx, Ry, Rz); any combination is possible.

A workspace defines all reachable positions of the mobile platform for specified degrees of freedom. An infinity of workspaces exists depending on which DOF are set to be swept and which DOF are set to be constant among Tx, Ty, Tz, Rx, Ry, Rz.
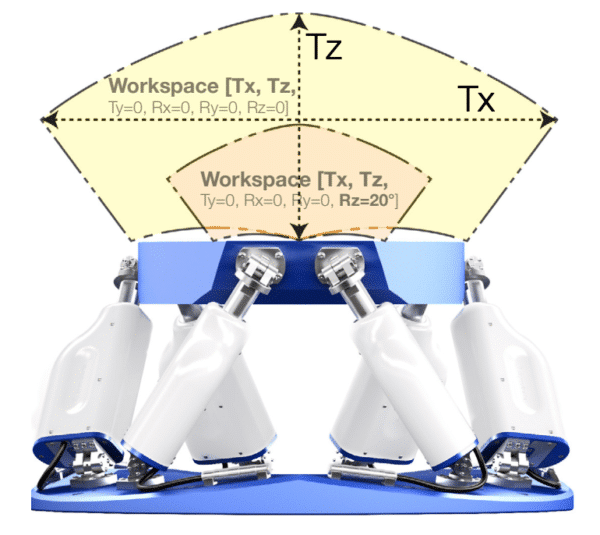 Example of two workspaces: – In yellow, the workspace [Tx=swept, Tz=swept, Ty=0, Rx=0, Ry=0, Rz=0]. – In orange, the workspace [Tx=swept, Tz=swept, Ty=0, Rx=0, Ry=0, Rz=20°]. The orange workspace is smaller than the yellow workspace because the Rz rotation requires extra actuators’ length.
Example of two workspaces: – In yellow, the workspace [Tx=swept, Tz=swept, Ty=0, Rx=0, Ry=0, Rz=0]. – In orange, the workspace [Tx=swept, Tz=swept, Ty=0, Rx=0, Ry=0, Rz=20°]. The orange workspace is smaller than the yellow workspace because the Rz rotation requires extra actuators’ length.
Types of Hexapods
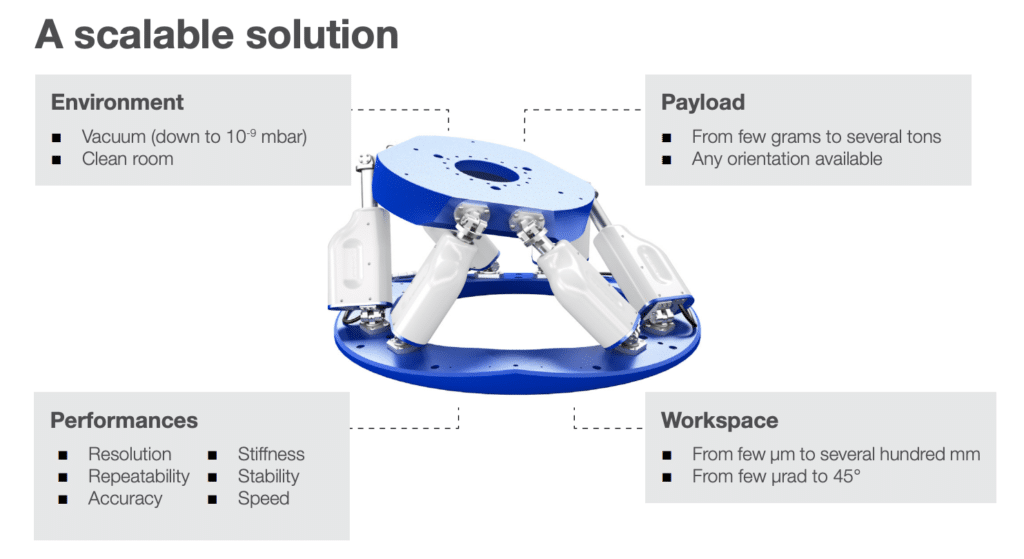
Symetrie, one of the world’s leading providers of hexapod solutions for positioning and motion applications, offers two lines of products:
Positioning hexapods are used to precisely align optical components, samples on beamlines, or mirrors on satellites or telescopes. They generally have submicrometer resolution but their speed is mostly limited to several mm/s.
Motion hexapods can simulate the motion of a boat, truck, tank, aircraft, etc. in order to test an instrument that will be on board later: sensors, electro-optics systems, antennas, inertial measurement units, gravimeters, etc. These dynamic motion hexapods can go to a speed of 1 to 2 m/s and they can reach 1g acceleration.
Hexapods in Astronomy
Ground-based telescopes are becoming more and more powerful in order to help astronomers to see further and more accurately. As a consequence, telescope manufacturers are looking for improved mirror positioning performance. Hexapods for astronomy are mostly used to realign the secondary mirror relatively to the primary mirror to compensate for the mechanical deformations of the telescope structure due to temperature and gravity changes during the night.
Hexapods can also be used to position telescope instruments or to calibrate mirrors or other optical components during their manufacturing phases.
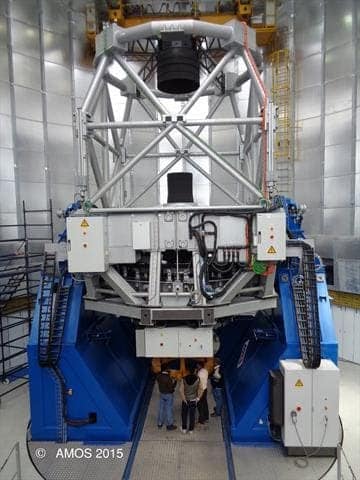
A hexapod is positioning the secondary mirror of the Indian ARIES DOT telescope with an accuracy of 0.5 µm (pictured above). The hexapod is located inside the black box on top of the telescope manufactured by AMOS in Belgium.
The ESO Extremely Large Telescope (ELT, pictured below) will have a primary mirror of 39 m, made of 798 segments. The optics specialist Safran REOSC is polishing and testing all the M1 segments. In order to calibrate them, the company uses 4 hexapods in order to position the segments and the calibration tools with high stability: 0.1 µrad over 1 hour.

Research & Engineering Applications
Thanks to the flexibility of the six degrees of freedom of the hexapods, these parallel kinematics systems can be used in various fields of research including chemistry, physics, industrial equipment.
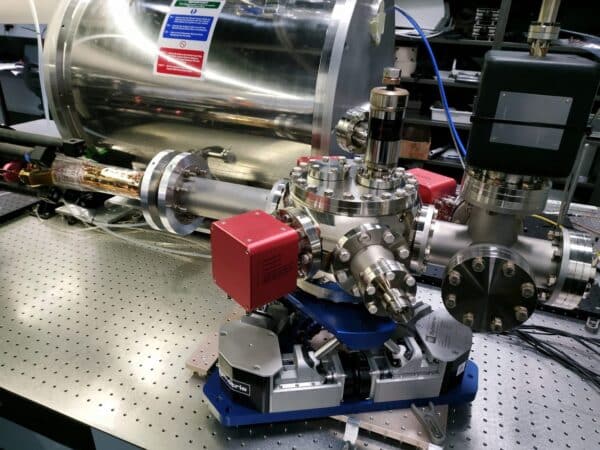
A non magnetic hexapod is positioning a vacuum chamber in a 2 Tesla magnetic field for quantum research at the University of Sydney.
Hexapods for Space Applications
Hexapods can be used by space companies and research institutes to accurately test and position satellite antennas, to align and assemble components together, to adjust and calibrate optical benches or to verify the quality of the optical instruments and their subassemblies.
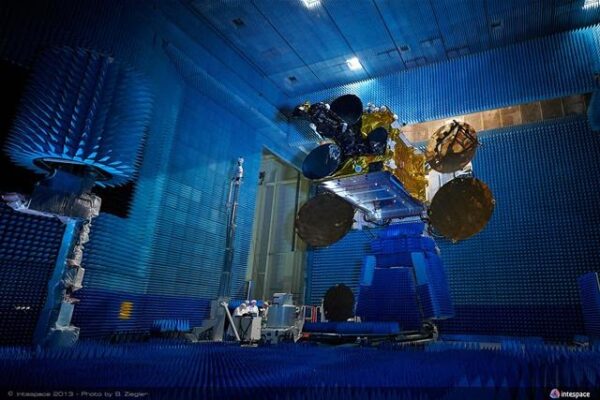
The telecommunication satellite manufacturers test the antennas’ performance inside anechoic chambers (above), in order to reproduce communications between the geostationary orbit and Earth stations.
During the life of the satellite, antennas can be reconfigured and reoriented to communicate with different stations. As the space mechanisms used to reorient the antennas cannot function at Earth gravity, they are replaced by hexapods during the RF tests.

A satellite that is sent to space cannot be repaired easily if needed after the launch. This is why it is crucial that each product has zero defects. Testing devices are fundamental for the success of the missions. Hexapods are very practical to calibrate space optical instruments thanks to their high resolution and their stability over time.
Synchrotron Applications
Precise positioning hexapods are particularly suitable for the specific and demanding needs of synchrotrons. They make it possible to align various components such as samples, mirrors, vacuum chambers, etc. with high resolution, great stability over time and high stiffness.
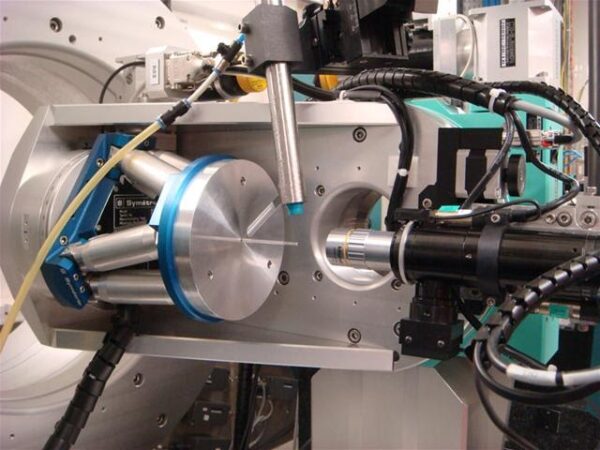
This compact BORA hexapod (above) is positioning a sample with 0.1 µm resolution at ESRF, the European Synchrotron. It is installed on a goniometer and can work in any orientation.

This BREVA hexapod (above) has been customized to have a larger angular travel range and to integrate an extra rotation under its mobile platform. It is installed at APS synchrotron on beamline 12-ID-D.
Optics Applications
For optics, the multiple degrees of freedom and the precision of hexapods make it possible to align components during assembly or test phases: alignment of lenses before bonding, calibration of mirrors and optical surfaces.

Two hexapods are integrated on the optical test bench of MIRIM, the Mid Infra Red IMager of the James Webb space telescope (above). A manual unit is positioning the cryostat containing MIRIM, while an electromechanical hexapod is positioning the light source with an accuracy of 10 µm. These tests have been done by the Astrophysics Department of CEA.