







 Description
Description Specifications
Specifications Applications
Applications Pictures
Pictures Downloads
Downloads
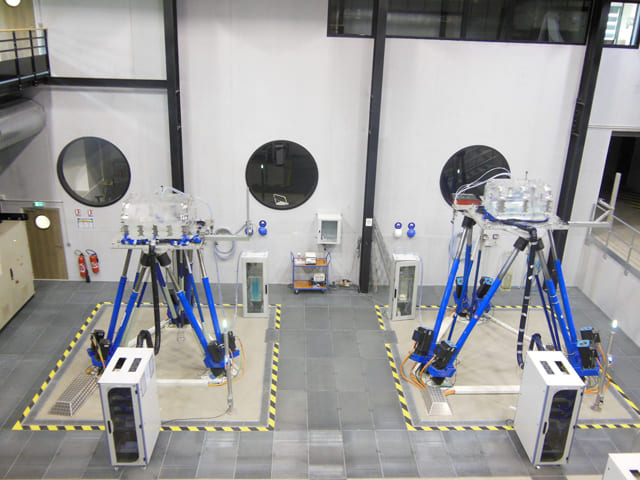
AQUILON large amplitude motion hexapod, in a nutshell
AQUILON large amplitude motion hexapod has the largest payload capability as well as travel range (movement amplitude) capability in our product range. It is capable of moving up to 6,000 kg payloads for the standard version, and even up to 10,000 kg payloads for the boosted model, with large amplitude, high speed and high acceleration. It is heavily used in the naval industry, for sloshing test and heavy swell simulation.
A hexapod is a platform with a parallel structure that facilitates motion across six degrees of freedom (DOF), making it suitable for testing and calibrating systems or simulating dynamic environments.
It can also be paired with a measuring hexapod to monitor the motion of the actuators and the mobile platform’s movements.
AQUILON large amplitude hexapod, in more details
Choosing the right hexapod for you
Symetrie offers a free software, HexaSym, designed to simplify the process of checking the travel ranges and load capacities of each hexapod in their lineup. HexaSym enables you to select the most suitable product for your application and test various configurations. See the “software” tab for more information on HexaSym. Click HERE to download HexaSym
For more information on applications for motion & positioning hexapods, visit our application page.
Simple Software for a Complex Machine
The SYM_Motion movement software allows you to control the movements of a dynamic hexapod on the basis of complex algorithms. It transforms the movements desired in the 6 degrees of freedom into useful information for each of the motors.
The software is simple and ergonomic so that operators can easily use the system.
SYM_MOTION Allows:
■ Position display in real time
■ Position the hexapod
■ The generation of sinusoidal and harmonic trajectories
■ To reproduce trajectories from recordings
■ The configuration of the center of rotation
■ Validate the trajectories in complete safety for the hexapod and its loading
Options
■ Acquisition: the possibility of retrieving the position of the hexapod from information from the absolute encoders of the motors, in real time or in post-processing
■ ERTT: External Real Time Trajectory, to control the hexapod in real time, for example via a joystick (ERTT requires the API option)
■ API: the possibility of going through a software interface other than SYM_Motion to control the hexapod